各種工程や搬送台車の自動化,高機能化,知能化,制振化

ハマグチ マサフミ
濱口 雅史
准教授
| 学部等 |
総合理工学部
機械・電気電子工学科
|
|---|---|
| researchmap 個人URL |
https://researchmap.jp/read0045457 |
| SDGs |
|
| ホームページURL |
産業分野
- 製造業 / 輸送用機械器具製造業
- 製造業 / 電気機械器具製造業
researchmap
研究分野
- ものづくり技術(機械・電気電子・化学工学) / 制御、システム工学
研究キーワード
ロボット,自動化,制振制御,知能化,搬送制御
研究概要
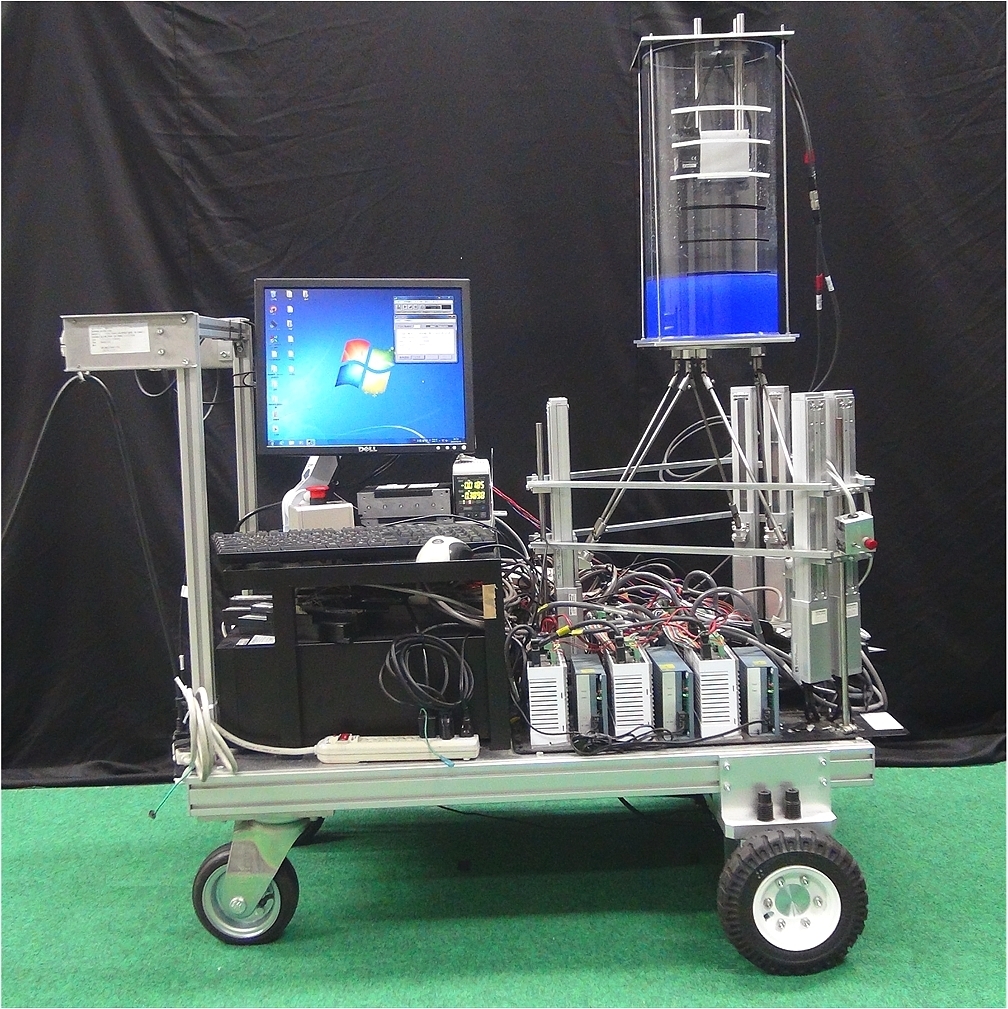
振動しやすいものを揺らさずに運ぶロボットについて研究しています.特に,液体容器の搬送を対象としています.応用例としては,給仕ロボットが考えられ,人手不足や感染症防止に貢献できます.
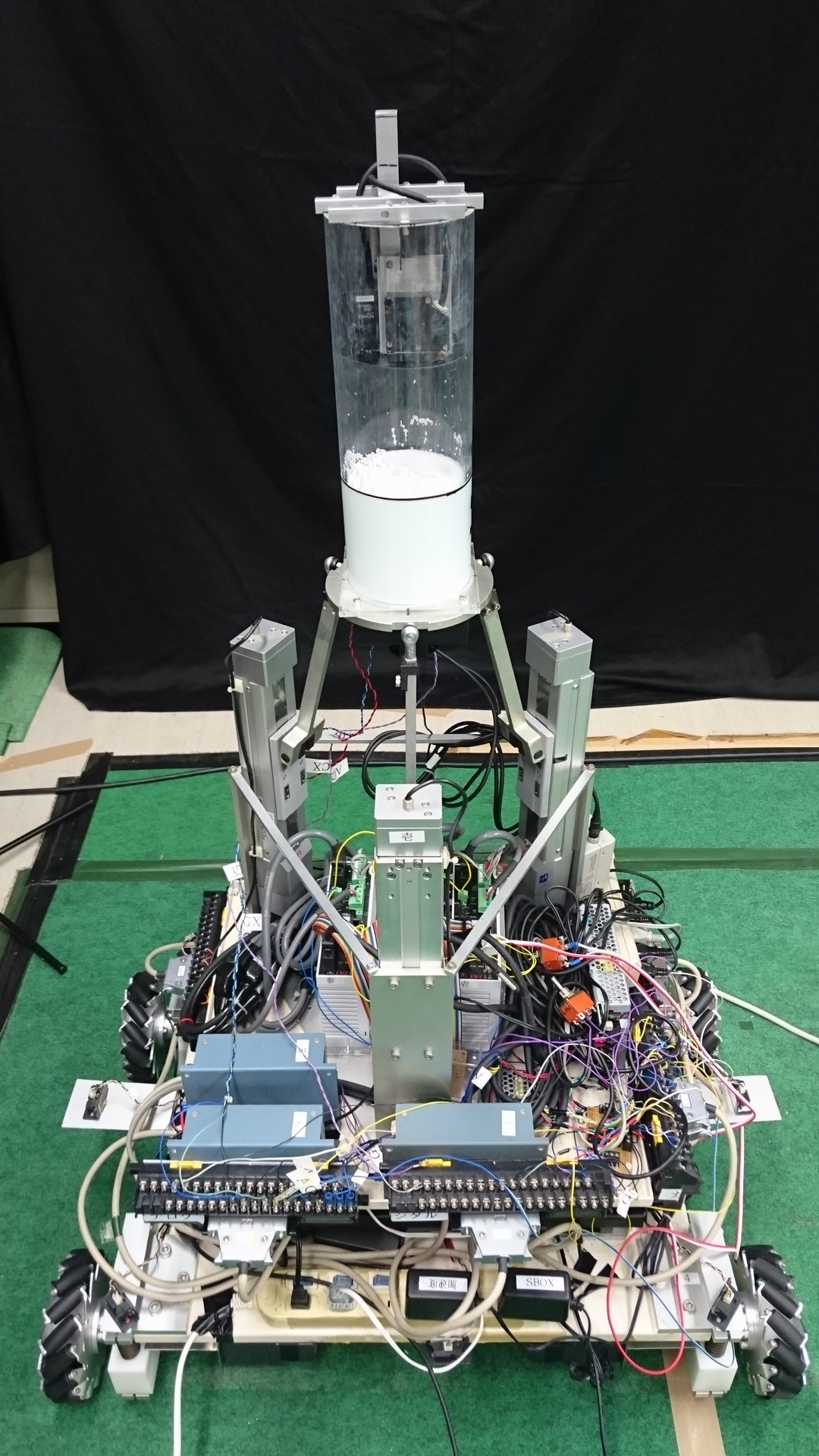
走行路面上に凹凸がある場合は,アクティブ吸振器が必要になります.当研究室では,アクティブ吸振器にパラレルリンク機構を用いています.この機構の特徴は,搬送台を高速・高精度で動作させることができることです.搬送するものが物ではなくて人であれば,乗り心地を向上させることもできます.
家庭や飲食店などでは,移動ロボットが走行できる領域が狭く,複雑な場合があります.そういう環境では,全方向に移動可能なロボットが有用です.当研究室では,メカナムホイールと呼ばれる特殊な車輪を利用した全方向移動ロボットを使用しています.
電動車椅子のように,機器を人が操縦することもあります.このとき,操縦者には操作性に好みがあるため,それぞれの好みに即した操作性が得られるようにすれば,ストレスや操作ミスが減ります.何度か操作することにより,好みの操作性が得られるように,AIを利用して調整する方法も研究しています.
走行路面上に凹凸がある場合は,アクティブ吸振器が必要になります.当研究室では,アクティブ吸振器にパラレルリンク機構を用いています.この機構の特徴は,搬送台を高速・高精度で動作させることができることです.搬送するものが物ではなくて人であれば,乗り心地を向上させることもできます.
家庭や飲食店などでは,移動ロボットが走行できる領域が狭く,複雑な場合があります.そういう環境では,全方向に移動可能なロボットが有用です.当研究室では,メカナムホイールと呼ばれる特殊な車輪を利用した全方向移動ロボットを使用しています.
電動車椅子のように,機器を人が操縦することもあります.このとき,操縦者には操作性に好みがあるため,それぞれの好みに即した操作性が得られるようにすれば,ストレスや操作ミスが減ります.何度か操作することにより,好みの操作性が得られるように,AIを利用して調整する方法も研究しています.
アピールポイント
PC上のシミュレーションのみではなく,実際に実験装置を製作して実機実験を行っています.過去には,農業機械メーカや映像撮影関連会社と共同研究を行った経験があります.